

Groupe mondial d’ingénierie à la pointe de l’innovation dans tous les grands secteurs industriels, SEGULA Technologies s’est lancé comme défi la mise au point d’un système innovant de prédiction de collision piéton-véhicule(s), utilisable pour le train autonome comme pour la voiture. L’objectif de cet outil est d’anticiper les collisions véhicule-piéton et tous types de mobiles pour agir avant l’accident. Pour cela, SEGULA a mis au point une puissante intelligence artificielle.
Avec l’augmentation du trafic routier et le développement des véhicules autonomes (voiture, train, bus, tram…), la sécurité, et plus spécifiquement l’évitement de piétons, ou d’obstacles, représente une problématique majeure.
Des outils combinant caméras, capteurs radars (exploitant les ondes radio) et capteurs lidars (utilisant la lumière infrarouge) permettent désormais de détecter les obstacles avec une fiabilité jusqu’ici jamais vue. Cependant, le coût de ces capteurs est très élevé. Ils sont, de plus, souvent encombrants et leur installation est complexe.
Face à ces contraintes, les équipes R&I de SEGULA Technologies se sont lancées le défi de mettre au point un outil plus abordable et moins volumineux, ne nécessitant ni radars ni lidars. Baptisé PREMCO (PREdiction des Mouvements dangereux des personnes aux abords des rails par stéréo Corrélation), cet outil innovant, universel utilisable pour les véhicules sur rail dans un premier temps, puis adaptable à tout type de véhicule autonome sera capable de repérer et d’anticiper tout risque de collision véhicule-piéton ou obstacle et cela en utilisant uniquement une(des) caméra(s) optique(s) et une intelligence artificielle avec l’apprentissage profond.
Le projet est aujourd’hui mené par une petite équipe d’ingénieurs spécialisés en intelligence artificielle au sein du département Recherche et Innovation de SEGULA, et est traité en partie dans une thèse CIFRE.
À terme, cette solution pourrait permettre le développement de véhicules autonomes à moindre frais et de grandes fiabilité grâce à cette technologie simple à intégrer.
Qu’est-ce que l’apprentissage profond ?
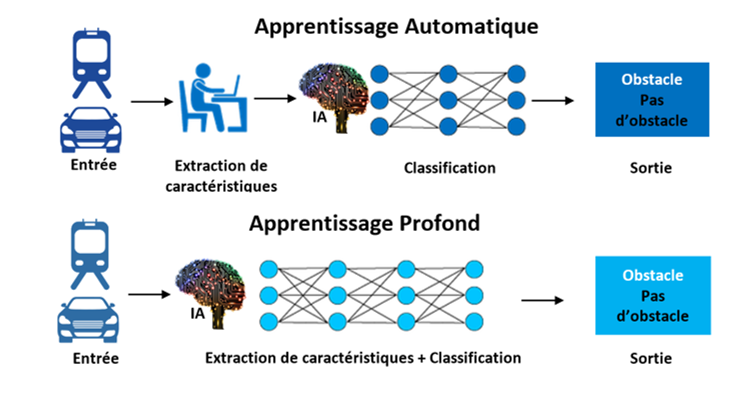
Parmi les méthodes existantes pour le développement d’une Intelligence Artificielle, les plus connues sont l’apprentissage automatique (ou Machine Learning) et l’apprentissage profond (ou Deep Learning). Ces deux méthodes consistent à effectuer un « apprentissage » sur une base de données afin de pouvoir faire des prédictions, sans nécessiter l’intervention d’une personne.
En plein essor depuis quelques années, l’apprentissage profond est le plus souvent utilisé pour détecter des objets spécifiques sur une image issue de vidéos. Cette technologie allie :
- La performance : l’apprentissage profond permet un taux de reconnaissance très élevé et une utilisation en temps réel.
- Une large variété d’applications à partir d’images, comme la détection d’objets, mais aussi l’estimation de distances et la prédiction de comportements.
- Une intégration simple et un coût relativement bas : seulement une unité de calcul et une caméra sont nécessaires au bon fonctionnement du système.
- L’universalité : le système peut être déployé à la fois sur le milieu routier ou ferroviaire.
Tandis que pour l’apprentissage automatique, les caractéristiques doivent être définies manuellement par l’utilisateur avant l’apprentissage, l’apprentissage profond quant à lui trouve automatiquement les caractéristiques à apprendre.
En quoi est-ce utile pour le projet PREMCO ?
Dans le cadre du projet PREMCO, les données à traiter sont de natures très variées (piétons, cycliste, voiture, arbre sur les rails, etc…). L’apprentissage profond est la seule méthode suffisamment rapide pour traiter la multitude d’informations de cet environnement en temps réel. De plus, cette méthode permet à l’IA de s’adapter à différents cas d’utilisation (voiture, train…), après très peu d’entrainement.
PREMCO utilise l’apprentissage profond couplé à une caméra pour détecter les objets les plus susceptibles de représenter un obstacle dans l’image, les localiser par rapport au véhicule, et enfin prédire leurs comportements et leurs trajectoires.
En fonction de ces informations, des actions pour éviter la collision pourront être engagées. Par exemple, si une personne traverse dangereusement la voie devant le véhicule, une alerte pourrait être donnée au conducteur et, le cas échéant, l’IA pourrait engagée un freinage d’urgence.
Les tests menés dans le cadre du projet PREMCO ont abouti à la mise en place de la détection d’objets, à la prédiction du centre 3D (c’est-à-dire le centre d’un objet type voiture, piéton…qu’on suit à la caméra et qui sert entre autre de repère pour le calcul de la profondeur de l’objet) et à l’estimation de profondeur qui fonctionne en temps réel sur la base de données virtuelle. Il s’agit maintenant pour les ingénieurs de l’équipe projet d’incorporer la prédiction de dimensions et l’orientation de l’objet détecté dans le modèle pour au final obtenir la localisation précise dans l’espace 3D de tous les objets.


 Pour une meilleure navigation
Pour une meilleure navigation